Джеймс Е. Каунсилмен "Спортивное плавание" М. Фис, 1982
Глава 5. НАУЧНО-ТЕОРЕТИЧЕСКИЕ АСПЕКТЫ ТЕХНИКИ ПЛАВАНИЯ
5.1. ЗНАЧЕНИЕ ВИНТООБРАЗНЫХ ГРЕБКОВЫХ ДВИЖЕНИЙ ДЛЯ СОЗДАНИЯ СИЛЫ ТЯГИ
Движения пловца в воде, особенно движения кистью и предплечьем, еще совсем недавно казавшиеся и тренерам, и специалистам по биомеханике движений несложными и понятными, вдруг оказались не такими уж простыми и потребовали для своего объяснения новых теорий и подходов. Правда, отдельные объективные описания и изображения этих движений, в том числе подводные кинограммы техники плавания сильнейших спортсменов, появлялись в печати и ранее, но они воспринимались обычно как ошибочные. Большинство специалистов придерживалось прямо противоположной точки зрения.
Например, распространенными рекомендациями, относящимися к совершенствованию техники плавания кролем, в литературе последних лет являлись следующие:
1. Руку во время гребка необходимо держать выпрямленной в локте.
2. Предплечье и кисть руки должны двигаться во время гребка по прямой линии спереди назад строго под телом пловца (кисть не должна выполнять никаких зигзагообразных движений).
Если мы выполним обе эти рекомендации, наш ученик будет выглядеть совершенно нетехничным в современном понимании этого слова. Позволим пловцу выполнять несколько "зигзагообразный" гребок выпрямленной в локте рукой - дела у него пойдут лучше. Напротив, если мы опустим ему локоть и заставим выполнять гребок все по той же прямой линии, мы увидим неправильную технику плавания, характерную для большинства новичков.
Что такое правильная техника плавания? Как часто мы, тренеры, слышали (а то и сами использовали) такое выражение, обращенное к пловцу: "Прекрати выполнять зигзагообразные движения кистью в воде! Греби строго спереди назад; отталкивай воду руками только назад, и сила реакции воды будет продвигать тебя вперед". Много лет назад, начиная работать
тренером, я также проповедовал своим ученикам технику прямолинейного гребка
выпрямленной в локте рукой под продольной осью тела. В правильности такой
техники плавания я усомнился, когда внимательно просмотрел подводные кинокадры
движений пловцов и увидел, что многие выдающиеся спортсмены выполняют гребок со
сгибанием руки в локте. Гребок прямой рукой был характерен лишь для новичков и
слабо подготовленных пловцов. Такая техника гребка отмечалась у большинства
пловцов, прошедших курс массового обучения плаванию в бассейнах нашей страны. Буквально миллионы людей были обучены неправильной технике.
В 1950 г. Луис Аллей провел интересное экспериментальное исследование. Он сравнил эффективность "нормальной" техники движений руками при плавании кролем (гребок прямой рукой с незначительным ее сгибанием лишь перед самым выходом из воды) и техники движений со сгибанием руки в локте во время гребка. Последний вариант гребка предусматривал, что пловец выполняет рабочее движение рукой по прямой линии спереди назад под телом, но сгибает ее в локтевом суставе до 90° в средней части гребка.
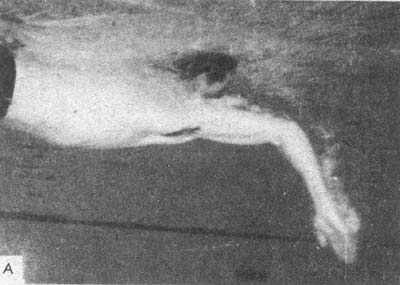
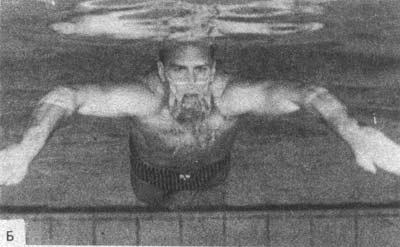
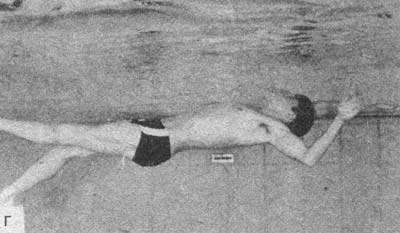
Рис. 124. Два неправильных варианта выполнения гребка: прямой рукой (А), со сгибанием руки в локтевом суставе, но строго по прямой линии спереди назад (Б)
Аллей предполагал, что эффективность гребка повысится, а сила реакции воды будет направлена только вперед, если выполнять гребок не прямой рукой по дуге (рис. 124,А), а строго по прямой линии назад и со сгибанием руки в локте (рис. 124, Б). Ему казалось, что в
соответствии с третьим законом движения Ньютона (закон равенства действия и
противодействия) второй вариант выполнения гребка явно предпочтительнее первого. Однако результаты эксперимента заставили Аллея сделать противоположный вывод: сила тяги при "нормальном" гребке (прямой рукой по дуге) выше силы тяги при гребке со сгибанием руки в локте и по прямой линии спереди назад.
В своем исследовании Аллей близко подошел к очень важной закономерности, относящейся к любым локомоторным движениям в воде человека и животных (в том числе рыб), к движению судов, но не смог сформулировать ее. Суть этой закономерности (в несколько упрощенном для большей доступности неподготовленному читателю виде) можно выразить так: максимальная сила тяги возникает в том случае, когда мы отталкиваемся от возможно большей массы воды, сдвигая ее назад возможно меньше, но не в том случае, когда мы отталкиваемся от небольшой массы воды, сдвигая ее назад на значительное расстояние.
Чтобы пояснить проявление этой закономерности, расскажу о случае, который произошел почти 100 лет назад с одним изобретателем. Этот человек долго ломал голову над вопросом, как повысить эффективность работы механизмов, приводящих речные суда в движение. Колесный пароход не казался ему совершенством: большие лопасти гребного колеса отбрасывали воду назад лишь на очень небольшом участке своего рабочего движения (рис. 125, А). Наш изобретатель решил установить на судне новый движитель - гребную гусеницу, лопасти которой в рабочем положении двигались в воде строго спереди назад на сравнительно большом отрезке пути (рис. 125, Б). Он полагал, что подобный движитель, отбрасывая лопастями воду строго назад, будет с большим эффектом и более экономично продвигать судно вперед. Когда пароход переоборудовали и запустили механизм в работу, то, к ужасу для изобретателя и лиц, финансировавших эту затею, оказалось, что судно почти не может сдвинуться с места. Как свидетельствовала печать тех лет, изобретатель был вынужден спешно покинуть данный город и никогда ни в одном ученом журнале не делал публикаций о своем изобретении. По сравнению с этим незадачливым изобретателем мы, тренеры, живем в более счастливые времена, так как нам не приходится покидать свой город, когда мы проповедуем ученикам те же самые неверные принципы создания тяговых усилий в воде.
Ошибка нашего изобретателя заключалась в том, что он не принял во внимание закономерность, кратко выраженную выше. Каждая лопасть его нового движителя захватывала небольшую массу воды и отталкивала ее назад на сравнительно большом участке пути. Но как только вода, толкаемая лопастью, приходила в движение, лопасть уже не могла более опираться об эту возмущенную воду и создавать тяговое усилие. Для того чтобы на лопасти возникла сила тяги, ей необходимо взаимодействовать с неподвижной массой воды или с потоком, движущимся в обратном направлении.
Рис. 125. Три типа судовых движителей:
А - гребное колесо, напоминающее гребок пловцу прямой рукой, который изображен на рис. 124. А;
Б - гребная гусеница, напоминающая гребок пловца со сгибанием руки в локтевом суставе и в направлении строго спереди назад, который изображен на рис. 124, Б; это наименее эффективный движитель из всех трех;
В - гребной винт. являющийся наиболее эффективным движителем. так как взаимодействует с большей массой воды, сдвигая ее назад на незначительное расстояние; работа этого движителя напоминает винтообразный гребок пловца, который был изображен на рис. 30, А. Передний край гребного винта всегда взаимодействует с невозмущенной массой воды. Пунктирные линии иллюстрируют путь движения переднего края обеих лопастей винта и напоминают траекторию движения кистей рук спортсмена во время гребка при плавании баттерфляем. Обратите внимание на сходство угла атаки лопасти винта и угла атаки плоскости кисти пловца (см рис. 127) по отношению к линиям их движения
Где же оптимальное решение вопроса? Для судов таким решением оказалось применение гребного винта. Гребной винт судна всегда захватывает своими лопастями невозмущенную массу воды и никогда не отбрасывает ее строго назад. В каждый данный момент своего движения лопасть винта вступает в контакт с неподвижной водной средой. Аналогично работает и воздушный винт самолета. Моя точка зрения в отношении гребковых движений пловца тоже сводится к тому, что спортсмен не должен пытаться отталкивать воду строго назад. Более эффективными для него будут винтообразные гребковые движения кистями рук и стопами.
Все то, с чем мы говорили выше, является достаточно обоснованным, и мы можем сделать вывод, что пловцу для создания максимума движущих сил во время гребка руками приходится решать два вопроса: 1) по какой траектории выполнять гребок, чтобы кисть руки все время контактировала с невозмущенной массой воды? 2) как ориентировать кисть во время гребка, чтобы она взаимодействовала с водой подобно лопасти гребного винта, но не лопасти гребной гусеницы.
Рис. 30 Криволинейные траектории движений руки во время гребка при плавании:
А - баттерфляем (вид снизу); Б - на спине (вид сбоку); В - брассом (вид снизу); Г - кролем на груди (вид снизу)
Рисунок 30, А, приведенный в разделе 2 главы 4, иллюстрирует нам, как чемпион Олимпийских игр 1964 г. Кевин Берри (а именно он изображен на этом рисунке) решил данные вопросы при плавании баттерфляем. И он, и другие пловцы-баттерфляисты мирового класса используют гребок руками, напоминающий по форме песочные часы или замочную скважину и позволяющий непрерывно опираться о невозмущенную массу воды. Они выполняют гребок не по прямым, а по криволинейным, эллиптическим траекториям. То же самое можно сказать и о спортсменах, плавающих кролем на спине, брассом и кролем на груди (см. рис. 30, Б, В, Г).
После того как в 1968 г. была опубликована моя книга "Наука о плавании", я получил массу писем от тренеров, спортсменов, инструкторов бассейнов, которые были искренне удивлены тем, что сильнейшие пловцы мира применяют гребки руками, подобные изображенным на рис. 30. Хотя это был достоверный фактический материал, некоторые читатели расценили движения как ошибочные, так и не приняв их за образцы.
Несколько слов об угле атаки кисти. Если мы хотим, чтобы кисть пловца работала подобно лопасти гребного винта, но не гребной гусеницы, мы должны придать ей оптимальную ориентацию (оптимальный угол атаки) относительно траектории рабочего движения. Об углах атаки кисти уже говорилось в разделах 4.2 - 4.6. Напомню: в связи с изменением направления движения кисти ее угол атаки изменяется таким образом, что она взаимодействует с водой подобно лопасти гребного винта. Эти изменения угла атаки кисти хорошо видны на подводной кинограмме гребковых движений пловца-баттерфляиста, которая показана на рис. 127.
Заключение. Приведены доказательства в подтверждение того, что квалифицированный пловец стремится выполнить кистями рук и стопами рабочие движения наподобие движений лопасти гребного винта или хвоста рыбы. Теория о том, что пловцу для продвижения вперед необходимо во время гребка отбрасывать воду строго назад, несостоятельна. Причина несостоятельности заключается в том, что, как только вода приходит в движение в направлении назад, величина силы тяги, создаваемой пловцом при опоре о данную массу воды, заметно уменьшается. Поэтому квалифицированные пловцы стараются использовать во время гребка криволинейные, эллиптические траектории рабочих звеньев тела.
Чтобы получить максимальную силу тяги во время гребка, необходимо, как отмечалось выше, опираться о возможно большую массу воды, незначительно сдвигая ее назад.
5.2. ПРИЛОЖЕНИЕ ЗАКОНА БЕРНУЛЛИ К ЛОКОМОТОРНЫМ ДВИЖЕНИЯМ ЧЕЛОВЕКА В ВОДЕ
Среди специалистов по плаванию давно утвердилось мнение о том, что движущая сила, возникающая на кисти во время гребка рукой, есть сила лобового сопротивления кисти. Я же в данном разделе книги хочу уделить внимание гидродинамической подъемной силе и рассмотреть ее роль в продвижении пловца вперед.
Примером использования силы лобового сопротивления воды как движущей силы являются рабочие движения веслами при гребле на шлюпке или каноэ. В. этих случаях сила, которая толкает лодку вперед, возникает в результате разницы давлений: на задней плоскости весла давление повышается, на передней плоскости, за которой образуются вихри, оно понижается (рис. 126, А). Зона вихреобразования, которую мы наблюдаем за передней плоскостью весла, является необходимым условием для образования силы лобового сопротивления. Если бы вихри не образовывались и поток воды плавно обтекал весло, то никакой бы разницы давлений спереди и сзади не возникало бы (вспомним парадокс д'Аламбера) и мы не смогли бы опереться веслом о воду.
Примером использования гидродинамической подъемной силы в качестве движущей являются скользящие движения кормовым веслом венецианских гондольеров, работа гребных винтов на судах. Киты, дельфины, большинство крупных рыб передвигаются в воде также за счет использования гидродинамической подъемной силы. Она возникает у них на плоскостях хвостового плавника во время локомоторных движений задней частью тела.
Многие годы специалисты по плаванию считали, что при плавании кролем спортсмен должен выполнять гребок рукой строго в направлении спереди назад под продольной осью тела. Они полагали, что кисть руки пловца взаимодействует с водой наподобие лопасти весла каноэ и поэтому должна отталкивать воду только назад (тогда в соответствии с третьим законом движения Ньютона пловец будто бы будет продвигаться только вперед).
Анализ подводных кинокадров техники движений чемпионов в различных способах плавания показал, однако, что они выполняют гребок не по прямой линии, а по траекториям, напоминающим по форме латинскую букву S, перевернутый вопросительный знак или подобную кривую линию. На рис. 30 читатель уже имел возможность познакомиться с подобными траекториями движений во всех четырех спортивных способах плавания. Были представлены движения чемпиона Олимпийских игр 1964 г. в плавании баттерфляем Кевина Берри (рис. 30,А), экс-рекордсмена мира в плавании на спине Чарльза Хиккокса (рис. 30, Б), экс-рекордсмена мира в плавании брассом Чета Ястремски (рис. 30, В) и трехкратной олимпийской чемпионки в плавании вольным стилем Даун Фрезер (рис. 30, Г). Анализ рабочих движений данных пловцов (пунктирной линией на рис. 30 обозначен путь среднего пальца руки во время гребка) показывает, что никто из них не пользуется прямолинейным гребком, все они выполняют гребок по криволинейным, эллиптическим траекториям. Правда, приводимые на рис. 30 траектории движений, во-первых, не являются пространственными (они даны лишь в двух измерениях), а во-вторых, построены относительно тела пловца. Все это не позволяет передать истинную картину движений спортсмена. Этих недостатков лишены траектории движений рабочих звеньев тела пловца, зафиксированные относительно неподвижной воды в трех основных плоскостях. Подобные траектории можно получить снимая движения пловца под водой неподвижной кинокамерой (с последующей обработкой полученных данных) или фиксируя на фотопленке в затемненном бассейне движения рук пловца с укрепленными на них миниатюрными источниками пульсирующего света.

Рис. 126. Проявление закона Бернулли:
А - образование вихрей за задней плоскостью весла (движущая сила весла продвигает лодку в направлении вихревой дорожки);
Б - картина обтекания воздушным потоком крыла самолета несимметричного профиля (с плавной выгнутостью верхней стороны профиля и чуть заметной вогнутостью нижней стороны): скорость воздушного потока над крылом возрастает, а давление падает, скорость воздушного потока под крылом уменьшается, а давление возрастает - в результате возникает аэродинамическая подъемная сила, направленная вверх;
В - возникновение движущей силы на лопасти гребного винта судна: в связи с тем, что лопасти винта работают в вертикальной плоскости, гидродинамическая движущая сила толкает судно в горизонтальном направлении;
Г - возникновение движущей силы на кисти руки пловца во время скользящего гребкового движения: разность давлений воды на переднюю и заднюю поверхности кисти обусловлена не столько вогнутым профилем кисти, сколько тем, что кисть развернута под определенным углом атаки к потоку воды
О некоторых законах гидродинамики, имеющих непосредственное отношение к плаванию
Чтобы понять рациональность винтообразных движений кистью руки во время гребка, нам необходимо рассмотреть некоторые законы гидродинамики.
Согласно закону Бернулли, давление жидкости падает там, где скорость ее движения повышается, и возрастает там, где скорость движения жидкости понижается. Крыло самолета, например, сконструировано таким образом и ориентировано к встречному потоку воздуха под таким углом атаки, что воздушный поток обтекает верхнюю поверхность крыла с более высокой скоростью, чем нижнюю. Разница в скоростях потока обусловливает и разницу в силе давления воздуха на нижнюю и верхнюю поверхности крыла, что, в свою очередь, является причиной возникновения аэродинамической подъемной силы (см. рис. 126, Б). Гребной винт судна создает движущую силу по тому же принципу (см. рис. 126, В), только здесь подъемная сила, возникающая на лопастях винта, направлена горизонтально и толкает судно вперед.
Сходную картину мы можем наблюдать и во время движения кисти руки пловца в воде, если она ориентирована под правильным углом к траектории своего движения, В этом случае кисть взаимодействует с потоком воды подобно лопасти винта, и на ней возникают силы, направленные в сторону продвижения пловца.
Другая важная закономерность гидродинамики указывает, что эффективность движения рабочих плоскостей движителя зависит от той массы воды, с которой эти плоскости взаимодействуют. Наиболее эффективными являются движения, при которых лопасти взаимодействуют со сравнительно большей массой воды, сдвигая ее назад на небольшое расстояние и с небольшим ускорением. Именно эта закономерность объясняет малую эффективность гребка строго по прямой линии и больший эффект в создании движущей силы во время винтообразных гребковых движений. Как уже говорилось, винт корабля или самолета никогда не отбрасывает воду или воздух строго назад. В любой момент движения лопасти винта взаимодействуют с невозмущенной массой той среды, в которой они вращаются. Нечто подобное можно наблюдать и в движениях руки спортсмена, особенно в начальных фазах гребка при правильной технике плавания. Напротив, когда спортсмен применяет нерациональный гребок рукой по прямой линии, ему приходится продолжительно опираться кистью на небольшую массу воды, сдвигая ее назад все с большей и с большей скоростью. По мере того как скорость движения данной массы воды назад увеличивается, эффективность опоры о воду рукой падает. Подобного снижения эффективности гребковых движений не наблюдается, если они выполняются по эллиптической траектории.
Анализ рабочих движений руками при плавании баттерфляем и другими спортивными способами
Способ плавания баттерфляй предоставляет нам прекрасную возможность проследить за изменением угла атаки кисти пловца во время гребка руками по криволинейной траектории. Поэтому к анализу движений пловца-баттерфляиста мы и обратимся прежде всего.
Траектория движения кистей, степень сгибания рук в локте и их положение относительно тела во время гребка при плавании баттерфляем олимпийского чемпиона Кевина Берри были
показаны на рис. 30, А. Подобным гребком, напоминающим по форме песочные часы, пользовались (с небольшими отличиями) все пловцы-баттерфляисты мирового класса, включая Гари Холла, Аду Кок, Марка Спитца. Траектория движения кистей рук пловца на рис. 30. А построена относительно тела спортсмена. Траекторию движения кистей относительно неподвижной воды при плавании баттерфляем можно увидеть на подводной кинограмме движений олимпийского чемпиона Чарльза Хиккокса (рис. 127). Движения были засняты 35-миллиметровой кинокамерой, установленной неподвижно на дне бассейна, в тот момент, когда спортсмен проплывал как раз над камерой. Частота киносъемки 24 кадра в 1 сек. Весь гребок (с момента, когда кисти рук вошли в воду, и до момента, когда они покинули ее) вместился в 25 кадров и занял по времени 1 сек. или чуть больше. На рис. 127 показаны лишь отдельные кадры, на которых запечатлены наиболее характерные моменты движений рук пловца (порядковый номер кадра указан на рисунке в скобках рядом с буквенным обозначением кадра; за кадр 1 принят момент входа кистей в воду).
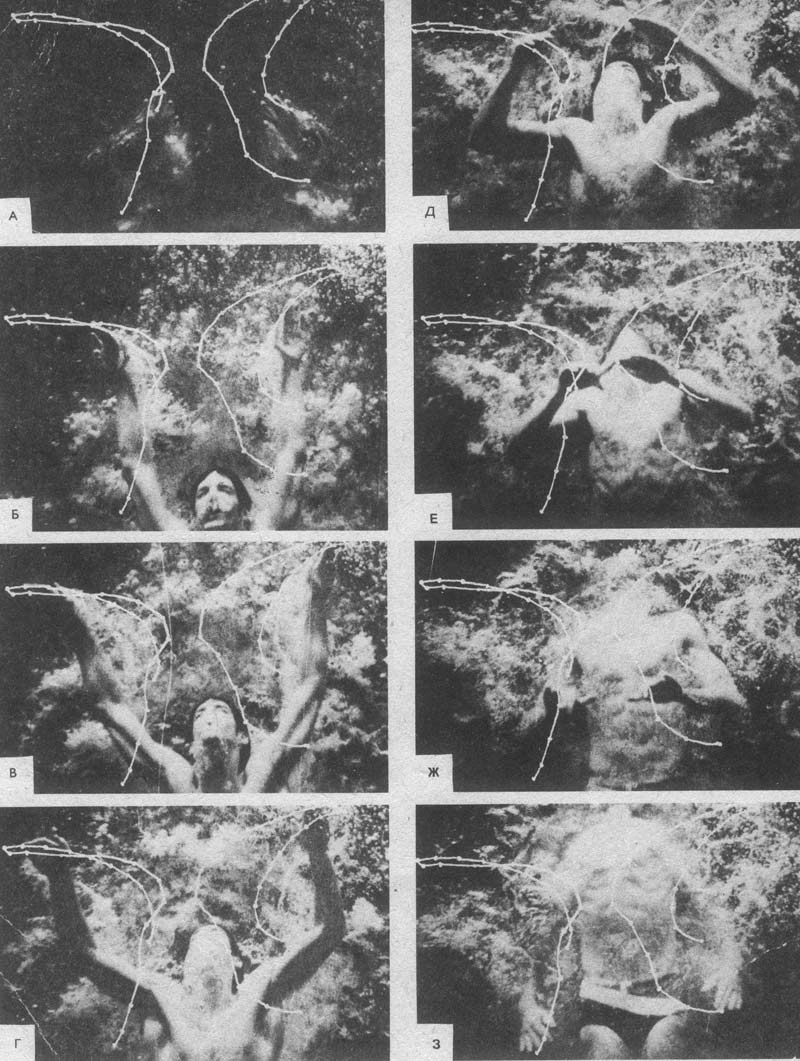
Рис. 127. Подводная кинограмма движений руками при плавании баттерфляем Чарльза Хиккоксв (вид снизу)
Анализ движения кистей в той фазе гребка, которая зафиксирована на кадрах с 1-го по 17-й, дает основание утверждать: сила, возникающая на кисти является в большей мере гидродинамической подъемной силой, чем силой лобового сопротивления. По субъективным ощущениям пловца, во время той части гребка, когда руки движутся кнаружи (кадры 1-11), он выполняет гребок руками назад относительно воды. На самом же деле, как это видно из кинограммы, кисти его рук движутся вперед. На протяжении всей этой фазы движений сила тяги образуется за счет гидродинамических подъемных сил. В этом случае кисть пловца создает движущую силу, взаимодействуя с водой при своем движении вперед подобно лопасти гребного винта или хвостового плавника дельфина. Чтобы подтвердить данный вывод, относящийся к движениям пловцов экстра-класса, мы должны были проанализировать угол атаки кисти во время гребка руками и рассмотреть, образуется ли на тыльной стороне кисти значительная зона вихрей. Сделать это с достаточной достоверностью на сегодня не представляется возможным. Некоторые данные об угле атаки кисти мы можем получить из анализа подводных кинограмм движений пловца (на рис. 127 наиболее характерными в этом отношении являются кадры 7, 13 и 16). В некоторых случаях, рассматривая кинограммы, можно судить и о степени вихреобразования на тыльной стороне кисти по движению воздушных пузырьков около нее. Например, на кинокадрах, на которых запечатлены гребковые движения слабо подготовленных пловцов, удавалось отчетливо видеть за кистью руки большую зону вихрей, заполненную воздушными пузырьками.

Рис. 128. Подводная кинограмма движений руками при плавании баттерфляем Кевина Берри (вид спереди)
На рис. 128 приведена подводная кинограмма движений Кевина Берри при плавании баттерфляем (вид спереди) с нанесенной на каждый кадр кинограммы траекторией движения кистей во фронтальной плоскости. Можно отчетливо проследить, как изменяется угол атаки кистей от кадра к кадру. В то же время заметно, что в каждый данный момент гребка, зафиксированный на кинограмме, кисть развернута относительно траектории своего движения таким образом, что создает силу тяги для продвижения пловца вперед. Подобную ориентацию кисти относительно потока воды можно увидеть и у других пловцов-баттерфляистов мирового класса.
Рис. 129. Характерные моменты положения рук и траектория движения кистей во время гребка баттерфляем Марка Спитца
Траектория движения кистей в горизонтальной плоскости и характерные моменты положения рук во время гребка в баттерфляе изображены на рис. 129. Этот рисунок выполнен на основе кинокадров, зафиксировавших технику плавания Марка Спитца (16-миллиметровая кинокамера была неподвижно установлена на дне бассейна). Отметим сходство траекторий движения кистей во время гребка руками в баттерфляе у Марка Спитца и Чарльза Хиккокса (сравните рис. 127 и 129), а также тот факт, что кисти рук входят в воду в начале гребка и покидают ее в конце гребка почти в одной и той же точке.
Все то, о чем мы только что говорили, анализируя рабочие движения руками при плавании баттерфляем, можно отметить в движениях спортсменов и в других способах плавания.
На рис. 130 показаны траектории движения кисти и характерные моменты положения руки во время гребка кролем призера чемпионата Европы в плавании вольным стилем и на спине испанского пловца Сант-Яго Эстевы. Траектория движения кисти, изображенная на рис. 130, А-Д, получена на основе подводных кинокадров техники плавания данного спортсмена (16-миллиметровая кинокамера была неподвижно установлена на дне бассейна и фиксировала пловца снизу). Эта траектория построена относительно
тела пловца. Истинная траектория движения кисти относительно неподвижной воды была зафиксирована на фотопленке при съемке спортсмена, когда он плыл в затемненном бассейне с пульсирующим источником света (20 вспышек в 1 сек.), закрепленным на среднем пальце каждой руки (см. пунктирную световую линию на рис. 130, Е). Однократная яркая общая вспышка света позволила запечатлеть на той же фотопленке и фигуру пловца. Хочу обратить внимание читателя на, то, что на последнем рисунке кисть спортсмена покидает воду после гребка несколько впереди точки своего входа в воду в начале гребка.

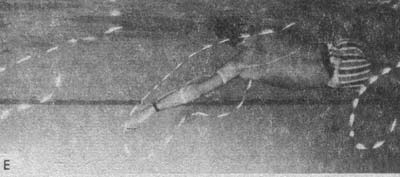
Рис. 130. Характерные моменты положения руки и траектория движения кисти относительно тела пловца (А-Д) и относительно неподвижной воды (Е) во время гребка кролем Сант-Яго Эстевы
Траектории движения кисти относительно неподвижной воды во время гребка рукой при плавании на спине показаны на рис. 131. Одна из них (см. рис. 131, А) построена по данным подводной киносъемки, другая (см. рис. 131, Б) зафиксирована с помощью источника пульсирующего света.
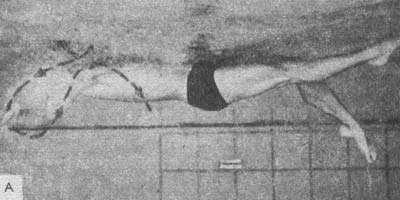

Рис. 131. Траектория движения кисти относительно неподвижной воды во время гребка рукой при плавании на спине Чарльза Хиккокса (А) и Сант-Яго Эстевы (Б)
Характерные моменты положения рук и траектории движения кистей относительно неподвижной воды во время гребка брассом олимпийского чемпиона Дона Маккензи показаны на рис. 132. Можно видеть, как в начальной фазе гребка кисти, выполняя гребок кнаружи, продолжают все еще двигаться вперед (рис. 132, А). Вообще вся первая половина гребка протекает так, что кисти не сдвигаются относительно воды назад. Лишь когда руки выполняют скользящее гребковое движение внутрь (рис. 132, Б), кисти слегка уходят назад.
Резкий скачок результатов в плавании брассом произошел у Маккензи перед Олимпийскими играми 1968 г., когда мы с ним стали работать над совершенствованием скользящего опорного движения кистями кнаружи-внутрь во время гребка. При этом особое внимание мы уделили правильной ориентации кисти (в частности, спортсмен избегал разворачивать кисть ладонью вверх в этой части гребка и во время выведения рук вперед). Пловец работал также над тем, чтобы лучше ощущать положительное давление воды на ладони и отрицательное - на тыльной стороне кисти. Он утверждал, что его представление о технике плавания брассом полностью изменилось после того, как у него возникло "чувство гребка руками".
Рис. 132 Характерные моменты положения рук и траектория движения кистей относительно неподвижной воды во время гребка брассом олимпийского чемпиона Дона Маккензи
Говоря о возникновении движущих сил на рабочих поверхностях кисти, мы должны сказать и несколько слов о высоком положении локтя во время гребка руками (подробнее об этом рациональном элементе техники плавания см. в разделе 4.2). На рис. 134 изображен элемент высокого положения локтя во всех четырех способах плавания. Он позволяет спортсменам добиться того, что направление силы реакции рук (силы, возникающей вследствие разницы давления воды на ладонной и тыльной поверхностях кисти) становится близким к горизонтали и позволяет пловцу с большим эффектом продвигаться вперед.
"Провал" локтя вниз (рис. 133) является грубейшей ошибкой в технике плавания. В этом случае силы реакции опоры направлены не вперед, а вверх.

Рис. 133. Неправильное положение руки ("провал" локтя вниз) во время гребка кролем
Рис. 134. Высокое положение локтя во время гребка руками при плавании кролем (А), брассом (Б), баттерфляем (В) и на спине (Г)
Заключение
С помощью подводной киносъемки и фиксации на фотопленке следа движения пульсирующего источника света, закрепленного на среднем пальце руки спортсмена, были получены эллиптические траектории движения рук во время гребка у пловцов экстракласса. Анализ кинофотоматериалов позволяет сделать вывод, что движущую силу, возникающую на кисти при ее взаимодействии с водой, с большим основанием можно отнести к гидродинамической подъемной силе, чем к силе лобового сопротивления воды.
Пловец продвигается вперед более эффективно, если он во время гребковых движений опирается на сравнительно большую массу воды, сдвигая ее назад с небольшой скоростью, по сравнению с тем, когда он опирается на небольшую массу воды, но сдвигает ее назад с гораздо большей скоростью.
Высокую эффективность проанализированных движений пловцов экстракласса можно объяснить исходя из закона Бернулли. Эти пловцы выполняют гребок рукой по эллиптическим траекториям и ориентируют кисть руки таким образом, чтобы скорость потока воды на тыльной стороне кисти была выше скорости потока на стороне ладони.
5.3. БИОМЕХАНИЧЕСКИЙ АНАЛИЗ ТЕХНИЧЕСКОГО МАСТЕРСТВА ПЛОВЦОВ КРОЛИСТОВ (Раздел написан Робертом Шлейхауфом)
Учение о технике плавания основывается на закономерностях биомеханики. Научный подход в этой области крайне необходим, так как, с одной стороны, движения спортсмена в воде чрезвычайно сложны, а с другой - у ведущих специалистов по плаванию существуют различные (порой противоречивые) точки зрения по одним и тем же вопросам техники. Джеймс Хей пишет в своей книге "Биомеханика спорта" следующее: "На высшем уровне мастерства успех часто зависит от совершенства отдельных элементов движений спортсмена, и ни один тренер в тех видах спорта, где техника играет ведущую роль, не может оставить эти элементы (как бы малы они ни были) без внимания или подходить к работе над ними на ненаучной основе. Знание закономерностей биомеханики окажет ему в этом случае неоценимую услугу".
В данном разделе книги излагается биомеханический анализ техники гребка рукой при плавании кролем на груди. Обзор методической литературы, посвященной технике движений и образованию движущих сил при плавании данным способом, показывает, что полного, научного понимания в этих вопросах еще не достигнуто. Вызывает удивление, но остается фактом то, что ряд сложнейших проблем техники плавания кролем с удивительной легкостью решается неспециалистами на основе лишь одних "здравых" рассуждений. К сожалению, в практике спортивного плавания возникает много вопросов, которые на первый взгляд кажутся непосвященному человеку само собой разумеющимися. Поэтому в наших рассуждениях ниже будут использованы многие закономерности биомеханики, особенно при анализе "само собой разумеющихся" вопросов.
Траектория движения руки во время гребка
В отношении гребка руками при плавании кролем существует немало ложных представлений. Еще совсем недавно большинство теоретиков плавания рекомендовали выполнять гребок рукой по прямой линии под продольной осью тела пловца таким образом, чтобы отталкивать воду только назад. Считалось, что третий закон Ньютона (равенство действия и противодействия) вполне приложим к объяснению движущих сил, возникающих во время гребка. Подобная точка зрения была основана больше на интуиции, чем на знании закономерностей биомеханики. Теория отталкивания воды строго назад во время гребка научна не более чем утверждение о том, что Земля плоская.
В 1969 г. Джеймс Каунсилмен опубликовал в декабрьском номере журнала "Swimming World" статью "Значение винтообразных гребковых движений для создания силы тяги" (Содержание упомянутой статьи Д. Каунсилмена полностью вошло в раздел 5.1 настоящей главы. - Прим. переводчика), в которой показал полную несостоятельность упомянутой выше точки зрения. В данной статье был сделан вывод о высокой эффективности винтообразных гребковых движений руками во время плавания спортивными способами. Иными словами, рекомендовалось во время гребка выполнять движения кистью таким образом, чтобы она взаимодействовала с водой подобно лопасти гребного винта (рис. 135). Рациональность подобного гребка объясняется образованием на рабочей плоскости кисти (во время ее скользящего движения вниз и вверх или из стороны в сторону) гидродинамической подъемной силы, которая используется в качестве силы тяги.
Важное значение гидродинамической подъемной силы может быть с достаточной объективностью объяснено путем анализа киноматериалов, в которых зафиксированы движения пловца, овладевшего высотами технического мастерства. В наших исследованиях в качестве такого пловца был выбран Марк Спитц, но им мог быть и любой другой пловец мирового класса.
Прежде всего попытаемся развенчать представление о том, что движение кисти спортсмена во время гребка направлено преимущественно назад. Рассмотрим рис. 136, на котором изображено движение кисти относительно воды во время гребка рукой Марка Спитца при плавании кролем. Рисунок показывает, что кисть правой руки выходит из воды (после завершения гребка) несколько впереди точки своего же входа в воду. Следовательно, за время гребка она переместилась в направлении вперед, но не назад. У крайне слабо технически подготовленного пловца в ряде случаев можно отметить, что кисть во время гребка движется преимущественно назад. В отношении такого пловца следует сказать, что он не столько опирается о воду для продвижения вперед, сколько прогребает ее назад. Кисть его отталкивает воду в одном и том же направлении слишком долго, и спортсмен не может добиться необходимой силы тяги.
Рис. 135. Винтообразный гребок рукой при плавании кролем (по рисунку из книги Джеймса Хея "Биомеханика спорта")
Рис. 136. Движение кисти относительно воды во время гребка рукой Марка Спитца
Ложное представление о преимущественном движении кисти пловца назад возникает у многих еще и потому, что они не делают различий между траекторией движения кисти относительно тела и траекторией ее движения относительно воды. Лишь траектория движения кисти относительно воды (именно такая траектория показана на рис. 136) позволяет нам проанализировать истинные силы, действующие на кисть со стороны воды. Траектории движения кисти относительно тела пловца, которые часто можно было видеть в литературе по плаванию прошлых лет, давали повод некоторым специалистам говорить о гребке рукой почти по прямой линии. В действительности же путь кисти во время гребка рукой при плавании кролем даже приближенно нельзя представить в виде прямой. Это заключение лишний раз подтверждает рис. 137, на котором криволинейная пространственная траектория движения кисти относительно воды изображена последовательно в трех основных плоскостях. Рассматривая данный рисунок, представьте себе, что во время гребка неподвижной остается лишь пунктирная линия, по которой следует кисть пловца, а сам пловец перемещается или справа налево (рис. 137, А), или прямо на нас (рис. 137, Б), или снизу вверх (рис. 137, В). Следует иметь в виду, что на плоском рисунке удается изобразить траекторию движения кисти лишь в двух измерениях, в то время как на самом деле она является пространственной кривой и как бы вбирает в себя все те положения, которые мы видим на рисунке при взгляде на пловца сбоку, спереди и снизу. Кроме того, для понимания сложной картины взаимодействия кисти с водой и возникновения движущей силы нам крайне необходимо рассмотреть еще одну характеристику - скорость движения кисти.
Рис. 137. Траектория движения кисти относительно воды в боковой (А), фронтальной (Б) и горизонтальной (В) плоскостях во время гребка рукой .Марка Спитца (рисунок сделан по кадрам кинофильма Джеймса Каунсилмена "Наука о плавании")
Скорость движения кисти
При обзоре современной литературы по плаванию становится очевидным тот факт, что в ней почти полным молчанием обходится вопрос о скорости движения кисти во время гребка. Теоретики прямолинейного гребка предполагали, что скорость движения кисти постепенно увеличивается к концу гребка, и больше этим вопросом не интересовались.
Обработка киноматериалов, полученных нами с трех основных точек съемки из-под воды, показала, что скорость движения кисти удобнее всего может быть вычислена последовательно по следующим трем основным направлениям: вправо и влево, назад и вперед, вниз и вверх. На рис. 138 показаны графики скорости движения кисти во время гребка рукой Марка Спитца именно по трем названным выше направлениям.
Первое заключение, которое мы можем сделать, анализируя графики, относится к тому факту, что скорость движения кисти при ее движении спереди назад или в любом другом направлении не возрастает равномерно. Мы можем сформулировать один из общих принципов эффективных гребковых движений рукой: максимальная скорость движения кисти возникает к моменту смены направления ее движения и поддерживается непродолжительно. Слишком высокая скорость кисти на большом отрезке пути поведет к падению эффективности гребка, к так называемому проскальзыванию руки в воде. Эта закономерность позволяет нам объяснить тот факт (подмеченный Д. Каунсилменом), что Спитц уменьшал темп гребковых движений, когда он хотел повысить скорость плавания на дистанции во время соревнований. Продолжительность гребка у спортсмена в этом случае увеличивалась, и он имел возможность повысить его эффективность за счет рабочих движений кистью вверх и вниз и из стороны в сторону. Из графиков скорости Vx и Vy, видно, что максимальные значения скорости достигаются во время движения кисти в плоскости, перпендикулярной к направлению продвижения пловца вперед. Зная, что подъемная сила возникает при движениях именно в этой плоскости и что ее величина возрастает с повышением скорости движения кисти, мы получаем убедительное доказательство истинности вывода о том, что подъемная сила как одна из составляющих доминирует в величине силы тяги пловца.
Рис. 138. Графики скорости движения кисти во время гребка рукой Марка Спитца
Детальный анализ графиков скорости кисти и траектории ее движения позволит читателю полнее разобраться в том, что же происходит на самом деле во время гребка рукой при плавании кролем.
Посмотрим на график скорости Vх при движении кисти вправо и влево (см. рис. 138) и на траекторию движения кисти во фронтальной и горизонтальной плоскостях (см. рис. 137). Видно, что с наиболее высокой скоростью кисть движется внутрь в середине гребка (точка А на графике скорости и на траектории движения) и кнаружи в конце гребка (точка В там же). Изменение направления движения кисти позволяет ей взаимодействовать с невозмущенной массой воды. Величины скорости движения кисти в указанных точках являются примерно равными и оптимальными. Более низкая скорость движения кисти повлечет за собой снижение силы тяги. Но и превышение данной скорости (а это можно наблюдать в движениях слабо подготовленных пловцов) отрицательно скажется на силе тяги, так как рука начнет "проскальзывать" в воде.
Не менее интересные заключения мы можем сделать, рассматривая график скорости Vy при движениях кисти вниз и вверх (см. рис. 138) и траекторию движения кисти в боковой плоскости (см. рис. 137). Движения кистью вниз и вверх - это тот элемент техники, на котором проверяется умение пловца варьировать скоростью движения руки, создавая оптимальную опору о воду во время гребка. Рассматривая траекторию движения кисти в боковой плоскости и график изменения скорости ее движения, мы видим, что кисть, опираясь о воду, вначале движется вниз (точка С), затем быстро скользит вверх (точка D), продолжает гребок, вновь двигаясь вниз, и, наконец, быстро устремляется снова вверх в конце гребка (точка Е). Во время выполнения столь сложных гребковых движений пловец развивает значительные усилия, о которых теоретики прямолинейного гребка не могли и догадываться.
Несколько иную картину мы видим на графике скорости Vz при движениях кисти вперед и назад (см. рис. 138). Наивысшее значение скорости мы наблюдаем в начале графика, и оно обусловлено не столько рабочим движением самой руки (рука в это время скользит вперед), сколько высокой скоростью поступательного движения тела спортсмена вперед. Точка, в которой кривая скорости пересекает ось абсцисс, заслуживает особого внимания. На графиках скорости движения кисти слабоподготовленных пловцов эта точка находится ближе к началу координат; иными словами, эти пловцы достигают положительной скорости движения кисти (т.е. движения кисти в направлении назад) в гребковом цикле движений раньше, чем это показано на графике рис. 138. Дальнейшие изменения кривой скорости V демонстрируют нам два пика (точки F и G), которые соответствуют моментам изменения направления в движениях кисти.
Таким образом, траектория движения кисти дает нам представление о форме гребка, график скорости движения кисти - о характере рабочих движений. Анализа этих пространственных характеристик рабочих движений пловца еще недостаточно, чтобы сделать заключение об их эффективности.
Необходим учет характера движений, распределения усилий в каждой фазе гребка (именно эта сторона техники отличает чемпиона от заурядного пловца). Динамика скорости движения кисти во время гребка наряду с формой траектории ее движения является важной количественной характеристикой технического мастерства спортсмена.
Следующей не менее важной характеристикой рабочего движения руки пловца, определяющей его эффективность, служит ориентация кисти и предплечья в потоке воды. Рассмотрим эту характеристику подробно.
Угол атаки кисти
"Чувство воды", о котором часто говорят пловцы, тесно связано с их способностью правильно ориентировать кисть и предплечье во время гребка. В противоположность широко распространенному представлению положение кисти, когда она развернута под углом 90° к направлению своего движения, не является оптимальным. Чтобы создать подъемную силу, кисть должна быть ориентирована в потоке воды под острым углом (рис. 139). На последнем рисунке кисть, которую мы видим со стороны кончиков пальцев, движется справа налево, а поток воды, с которым она взаимодействует, - в обратном направлении. Вертикальная составляющая Ry равнодействующей силы реакции воды, которая возникает на кисти, представляет собой подъемную силу; ее величина изменяется в зависимости от изменения угла атаки кисти.
Наибольшие величины подъемной силы наблюдаются при угле атаки близком к критическому (рис. 139, Б). При больших или меньших углах атаки величина подъемной силы уменьшается. Например, когда угол атаки крыла самолета превышает критический, отмечается так называемый срыв плавного обтекания крыла. В аналогичных случаях при плавании кисть руки начинает взаимодействовать с водой не как лопасть гребного винта, а как весло каноэ (рис. 139, В). При слишком малом угле атаки и подъемная сила Rу, и сила лобового сопротивления уменьшаются - кисть начинает скользить по потоку, эффективность гребка падает (рис. 139, А). Как видим, чтобы получить наибольшую величину подъемной силы, пловцу приходится тонко регулировать положение кисти в потоке воды, а сделать это он может лишь на основе "чувства воды".
Рис. 139. Зависимость соотношения подъемной силы Ry и силы лобового сопротивления Rx от утла атаки кисти
Горизонтальная составляющая Rx силы реакции воды представляет собой силу лобового сопротивления, ее величина непрерывно возрастает по мере увеличения угла атаки кисти. И сила лобового сопротивления, и подъемная сила являются лишь составляющими равнодействующей силы реакции воды (см. рис. 140). Последняя, строго говоря, и обусловливает величину силы тяги пловца. Иными словами, сила тяги во время гребка образуется за счет движения кисти с различной скоростью и в различных направлениях, в том числе и в направлениях, значительно отличающихся от направления поступательного движения тела пловца вперед.
Рис. 140. Правильное (А) и неправильное (Б) положения кисти во время диагонального гребкового движения рукой Марка Спитца (рисунок сделан по кадрам кинофильма Джеймса Каунсилмена "Наука о плавании")
Рисунок 140, А иллюстрирует нам образование силы тяги при правильном положении кисти во время диагонального гребкового движения рукой. В рассматриваемом случае кисть ориентирована к траектории своего движения под острым углом, а направление равнодействующей силы реакции воды R совпадает с направлением продвижения пловца вперед. Когда же кисть ориентирована к траектории своего диагонального движения под заметно большим углом, равнодействующая сила R направлена в сторону (рис. 140, Б) и, как правило, вызывает ненужные боковые движения бедер пловца.
Таким образом, эффективность силы тяги гребка зависит от оптимального соотношения подъемной силы и силы лобового сопротивления. Это значит, что пловцу во время гребка необходимо непрерывно изменять ориентацию кисти в соответствии с изменением направления гребка. Необходимо также следить и за положением предплечья: его рабочая поверхность должна взаимодействовать с потоком воды подобно лопасти гребного винта. Талантливые пловцы всегда выполняют с этой целью гребок с высоким положением локтя (рис. 141).
Следует отметить, что не во всех фазах гребка кисть должна быть ориентирована таким образом, чтобы равнодействующая сила реакции воды была направлена строго вперед (рис. 142). В отдельные моменты цикла движений действуют различные силы, затрудняющие продвижение тела пловца вперед. Это и инерционные силы, и силы, возникающие во время рабочих движений ногами. В подобных случаях кисть занимает во время гребка такое положение, при котором сила опорной реакции может нейтрализовать действие вредных сил. Именно этим можно объяснить различия в технике гребка руками при плавании шести- и двухударным кролем. На Олимпийских играх в Мюнхене Форбс Карлайл отметил довольно низкую частоту гребков у группы спортсменов, применяющих шестиударный кроль (примерно 39 полных циклов движений на 100- метровом отрезке дистанции 400 м), по сравнению с частотой гребков у группы спортсменов, использовавших двухударный кроль (примерно 54 полных цикла на 100-метровом отрезке). Обе группы спортсменов показывали одинаково высокие результаты, и казалось непонятным существование двух названных разновидностей техники плавания кролем, тем более что существующая теория отрицает создание движущей силы за счет движений ногами в кроле. Картина, однако, проясняется, если мы посмотрим на нее с учетом соотношения "подъемная сила - сила лобового сопротивления", возникающего и постоянно меняющегося во время гребка руками.
Рис. 141. Гребок с высоким положением локтя
Становится очевидным: в шестиударном кроле спортсмен может в середине гребка выполнить движение кистью из стороны в сторону или вниз-вверх с высокой скоростью именно в связи с тем, что в этой фазе цикла появляются от движений ногами вредные вертикальные и боковые силы. На нейтрализацию этих вредных сил и уходит часть полезных сил, возникающих на кисти, в частности сила лобового сопротивления. Подъемная сила, которая достигает своего максимума за счет резко возросшей скорости кисти, продолжает служить продвижению пловца вперед. Например, на графике скорости движения кисти Уу во время гребка рукой Марка Спитца в шестиударном кроле (рис. 143, А) мы отмечаем в точке D резкое ускорение движения кисти. Оно, как можно считать с достаточной уверенностью, вызывает уменьшение амплитуды движений ногами, так как в этот момент цикла движений отпадает необходимость в сильном ударе ногой вниз. У другого пловца, Джона Кинселлы, который плавает двухударным кролем, такого скользящего движения кисти вверх мы не отмечаем (рис. 143, Б).
Рис. 142. Направление равнодействующей силы реакции воды R и ее составляющих Rx и Ry в начальной и конечной фазах гребка рукой Марка Спитца
Можно сделать вывод, что Джон Кинселла, оптимально варьируя скоростью движения и углом атаки кисти во время гребка, плывет применяя более экономную технику, но ему, приходится для поддержания высокой скорости плавания выполнять движения руками в более быстром темпе, чем Марку Спитцу. В известной мере это напоминает ситуацию в судостроении, где оптимальный угол установки лопасти гребного винта (угол атаки лопасти) рассчитывается для определенного судна с учетом числа оборотов в 1 мин. вала судового двигателя. В плавании спортсмены в зависимости от уровня своей силовой и технической подготовленности добиваются оптимального гребка путем варьирования темпом движений и положением кисти в потоке воды.
Высокие результаты, которые показывают спортсмены, использующие как двух-, так и шестиударный кроль, подтверждают мысль: образование движущих сил во время гребка подчиняется общим закономерностям, но эти закономерности проявляются через индивидуальную технику отдельных спортсменов. Проследить проявление общих закономерностей биомеханики в чрезвычайно вариативных движениях пловцов являлось задачей нашего исследования.
В настоящее время эти исследования продолжаются. Особое внимание уделяется математической обработке данных, относящихся к скорости движения и углу атаки кисти во время гребка. Думается, что эти два параметра движений (при их точном измерении) могут стать хорошей опорой для объективного анализа техники плавания любого спортсмена. Однако тренеру прежде, чем заниматься точными измерениями, необходимо овладеть знаниями основных закономерностей биомеханики, понять важность и взаимообусловленность таких характеристик, как криволинейные траектории движения кисти, флюктуации скорости движения кисти, точная ориентация кисти и предплечья в потоке воды во время гребка. Сплав этих знаний и опыта тренера послужит дальнейшему росту технического мастерства пловцов.
Рис. 143. Сравнительный анализ изменения скорости движения кисти V во время гребка рукой в шестиударном (А) и двухударном (Б) кроле (рисунок сделан по кадрам кинофильма Джеймса Каунсилмена "Наука о плавании")
5.4. ГИДРОДИНАМИЧЕСКИЙ АНАЛИЗ ДВИЖЕНИЙ РУКАМИ ПРИ ПЛАВАНИИ СПОСОБОМ БРАСС (Раздел написан Робертом Шлейхауфом)
Гребок руками при плавании брассом является наиболее простым рабочим движением из всех спортивных способов плавания. Несмотря на это, до сих пор существуют различные точки зрения по основным вопросам техники плавания данным способом. Тренеры нередко задают себе такие вопросы: 1) выполнять ли гребок руками строго в направлении назад или использовать скользящие движения в стороны по округлой траектории? 2) выполнять ли длинный гребок руками приближая локти к грудной клетке или использовать более короткое рабочее движение руками? 3) ускорять ли движение кистями постоянно в направлении назад во время гребка или нет? И хотя ответы на поставленные вопросы должны быть, как представляется, простыми и однозначными, они отсутствуют, так как отсутствует достаточный фактический материал по данному разделу техники плавания.
Получить объективные данные о таких параметрах техники плавания брассом, как траектории, скорость движения и угол атаки кисти во время гребка, мы можем на основе обработки киноматериалов.
Подобные данные довольно хорошо, хотя и опосредованно, характеризуют умение пловца выполнять гребок наиболее эффективно. Более информативным методом оценки технического мастерства спортсмена, на наш взгляд, является анализ полученных при обработке киноматериалов данных сквозь призму закономерностей гидродинамикой. С помощью подобного "гидродинамического анализа" силы, которые возникают во время гребка при плавании брассом, могут быть рассчитаны по величине и направлению. Подобный векторный анализ явится прочной основой для дальнейшей работы тренера над повышением технического мастерства спортсмена.
Оптимальный вариант гребка руками
Данный раздел книги посвящен анализу того варианта техники плавания брассом, которым владел Дон Маккензи - олимпийский чемпион Мехико. Представление о технике его движений читатель мог получить по фильму "Пловцы международного класса - 1968" фирмы "Спидо" и фильму Джеймса Каунсилмена 1972 г. "Наука о плавании" (Оба фильма хорошо знакомы советским специалистам по плаванию. - Прим. переводчика.)
В качестве представителя данного варианта техники плавания брассом был взят сильный пловец одной университетской команды (условно он назван пловцом № 1). Техника его движений имеет много общих черт с техникой плавания Дона Маккензи.
На рис. 144 пунктирными линиями изображены траектории движения кисти правой руки относительно воды во время гребка руками брассом пловца № 1 последовательно в трех основных плоскостях.
Чтобы получить образное представление о движениях пловца, читатель может вообразить, глядя на рисунок, как кисть движется по траектории, остающейся неподвижной, а сам пловец перемещается или прямо на нас (рис. 144, А), или слева направо (рис. 144, Б), или снизу вверх (рис. 144, В).
Траектория движения кисти пловца в горизонтальной плоскости (рис. 144, В) построена на основе анализа кадров кинопленки, отснятой оператором со дна бассейна кинокамерой, направленной объективом строго вверх. Проплывавший над кинооператором спортсмен попадал в поле зрения камеры, и положения его кистей во время гребка руками фиксировались на кинопленке именно в той последовательности, которую мы видим на рисунке (обозначенная цифрой точка траектории кисти соответствует ее положению в определенном кинокадре). Отметим, что взгляд на пловца снизу хорошо выявляет винтообразный характер гребка руками при плавании брассом. Кисть спортсмена выполняет рабочие движения преимущественно из стороны в сторону: кисть нажимает на воду в точках 3-10, затем скользит внутрь в точках 10-15. Назад она смещается незначительно (в точках 6-11). Мы можем сказать также, что во время гребка (от точки 3 до точки 15) кисть перемещается в направлении вперед. И этот факт развенчивает теории, утверждающие, что во время гребка руками при плавании брассом вода отталкивается в направлении назад.
График скорости движения кисти в трехмерном пространстве во время гребка руками при плавании брассом пловца № 1 показан на рис. 145. К сожалению, достоверных аналогичных данных, относящихся к гребку руками Дона Маккензи, нет. Однако примерные расчеты, выполненные на материалах по технике плавания данного и ряда других пловцов-брассистов мирового класса, показывают, что характер кривой на графике скорости движения кисти во время гребка руками у этих пловцов весьма близок к характеру кривой, которую мы видим на рис. 145. В этом сходстве нет ничего удивительного, так как траектории движения кистей во время гребка у всех исследованных нами пловцов-брассистов мирового класса, включая Дона Маккензи, весьма похожи на аналогичные траектории пловца № 1 (см. рис. 144). Правда, максимальные величины скорости движения кисти, надо полагать, будут различными у разных пловцов (в зависимости от индивидуальных размеров кисти, длины рук, угла атаки кисти во время гребка). Но характер кривой скорости движения кисти, надо ожидать, будет оставаться сходным у всех пловцов-брассистов высокого класса.
Рис. 144. Траектория движения кисти относительно воды во фронтальной (А), боковой (Б) и горизонтальной (В) плоскостях во время гребка брассом пловца № 1
Рис. 145. График скорости движения кисти в трехмерном пространстве во время гребка руками в брассе (пловец № 1)
Рассмотрим график скорости движения кисти во время гребка руками пловца № 1 и характер траектории движения кисти этого же пловца в горизонтальной плоскости. Прежде всего наше внимание обращает на себя тот факт, что кисть на первой части своего пути (до точки 8) выполняет давление на воду, ускоряя свое движение в направлении кнаружи. Этому ускорению соответствует первый пик скорости на графике. Второй пик скорости появляется в тот момент, когда руки завершают наиболее важную и мощную фазу гребка - винтообразное скользящее движение кистями внутрь. Интересно отметить, что в тот момент, когда кисть смещается назад (точка 10), скорость ее движения становится минимальной (см. рис. 145). Возникает впечатление, что пловец интуитивно догадывается о малой эффективности отталкивания воды назад и замедляет движение кистью в этой части гребка. Лишь после того, как кисть, сменив направление, вновь выходит в положение, оптимальное для мощного винтообразного движения кнутри, скорость ее движений возрастает. Не менее интересным является и вывод, который можно сделать после проведенного анализа: во время гребка руками при плавании брассом движение кисти не является равномерно ускоренным в направлении назад; кисть спортсмена движется с положительным ускорением вначале кнаружи, а затем (после непродолжительного замедления) кнутри.
Угол атаки кисти
Наиболее значимой характеристикой, определяющей эффективность гребка руками, является угол атаки кисти. Строго говоря, угол атаки кисти есть угол между плоскостью кисти и линией ее движения, и его можно точно измерить. Пловцы определяют оптимальный угол атаки кисти во время гребка, опираясь на субъективное "чувство воды". Это двигательное ощущение играет важную роль в создании необходимой силы тяги.
Например, пловец может выполнять гребок руками почти по идеальной траектории и с оптимальной скоростью, но продуктивность гребка будет оставаться невысокой, если кисть во время рабочего движения ориентирована неверно. В этом случае пловец будет выполнять движения правильно лишь по форме, не заботясь об их эффективности. Тренер должен уметь отличать истинно правильный и качественный гребок от гребка, который только внешне выглядит правильным. Для этого ему необходимо понимание механизма образования сил во время гребка.
Образование сил во время плавания
Рис. 146. Возникновение сил на крыле самолета при обтекании его потоком воздуха
Чтобы понять значение правильного угла атаки кисти во время гребка для создания силы тяги, рассмотрим возникновение сил на крыле самолета при обтекании его потоком воздуха (рис. 146). При оптимальном угле атаки крыла, который равен примерно 18°, на крыле образуется максимальная величина подъемной силы. (В данном случае эта сила направлена вверх.) Однако, когда мы говорим о движениях в воде, понятие "подъемная сила" не должно ассоциироваться у нас с направлением силы вверх.
Например, подъемная сила, которая образуется на лопастях гребного винта судна, направлена вперед и двигает судно. Сходная картина возникает и во время винтообразных гребковых движений пловца - образующаяся на кисти подъемная сила направлена преимущественно также вперед.
Другой силой, которая образуется на крыле самолета (см. рис. 146) или на кисти движущейся в воде руки пловца, является сила лобового сопротивления. Сила лобового сопротивления крыла, как и сила лобового сопротивления тела пловца при его движении в воде, является силой торможения. Когда же мы выполняем в воде рабочие движения веслом каноэ или кистью руки пловца, возникающая сила лобового сопротивления является частью движущей силы или, как принято говорить, силы тяги. Отталкивание воды кистью строго в направлении назад служит примером, когда сила тяги создается только за счет сил лобового сопротивления.
Расчет величин подъемной силы и силы лобового сопротивления, образуемых во время гребка рукой, может быть произведен тем же путем, который используется в судо- и самолетостроении. В нашем плавательном клубе мы на основе гидродинамического анализа движений пловцов смогли получить конкретные значения сил (и по величине, и по направлению), возникающих во время гребковых движений руками. Подобный анализ позволяет тренеру "проектировать" и рассчитывать оптимальные характеристики гребка своих учеников, подобно тому, как инженер рассчитывает определенные параметры машин. Приводимый ниже материал позволит читателю убедиться на конкретных примерах в пользе подобного анализа движений пловца.
Гидродинамический анализ движений пловца № 1
Рис. 147. Образование сил во время гребка руками (пловец № 1):
R - равнодействующая сила реакции воды; Ry - подъемная сила; Rx - сила лобового сопротивления; Т - сила тяти
Рассматривая рис. 147, на котором изображены результаты гидродинамического анализа движений пловца № 1, мы можем отметить, что образование сил на кисти во время гребка довольно сходно с возникновением сил на крыле самолета (см. рис. 146). Правда, здесь имеются и различия. Они заключаются, во-первых, в том, что оптимальная величина угла атаки кисти равна 37°, а это значительно больше угла атаки угла самолета (различия объясняются несходством формы и профиля крыла и кисти). Во-вторых, подъемная сила Ry, возникающая
на кисти, по своему направлению приближается к направлению продвижения пловца
вперед. Наконец, силу лобового сопротивления кисти Rx мы не можем отнести к силам торможения - в данном случае эта сила стремится лишь столкнуть тело спортсмена в сторону, но так как на кисти другой руки образуется аналогичная по величине и противоположная по направлению сила, то они взаимно уравновешиваются и не влияют на продвижение пловца вперед.
Действие сил Rx и Ry по величине и направлению можно заменить одной равнодействующей силой R и уже от этой силы R найти ее составляющую, направленную вперед и называемую силой тяги Т. Поскольку при плавании брассом в гребке принимают участие обе руки, то силы тяги правой и левой рук суммируются, общая сила тяги становится равной 2Т. Как будет показано ниже, векторный анализ сил, возникающих на кисти во время полного цикла движений руками, представляет хорошую объективную основу для совершенствования техники плавания.
Рис. 148. Образование сил во время первой половины гребка руками пловца № 1. Условные обозначения те же, что на рис. 147
Но прежде, чем двигаться дальше, рассмотрим типичный случай образования сил во время первой половины гребка руками - давления кистями на воду кнаружи (рис. 148). Хотя в первой половине гребка движения руками не являются столь мощными, как во второй, тем не менее, они очень важны и подчиняются уже рассмотренным выше закономерностям гидродинамики.
Как изображено на рис. 148, направление равнодействующей силы R, образовавшейся на кисти, приближается к направлению продвижения пловца вперед, хотя одна из ее составляющих - сила Rx направлена кнутри. Однако действие силы Rx уравновешивается действием такой же силы, возникающей на кисти другой руки, и не оказывает влияния на общее продвижение пловца вперед. Величина силы тяги Т, которая отмечается в анализируемый момент гребка, является наибольшей для всей его первой половины и совпадает с пиком скорости рабочего движения кисти. Следует заметить, что наибольшие величины силы тяги и скорости движения кисти образуются в то время, когда и направление траектории движения кисти и угол атаки кисти обусловливают образование равнодействующей силы, направленной преимущественно вперед. Иными словами, в движениях данного спортсмена в тесном единстве проявляются оптимальные характеристики трех компонентов высокоэффективного гребка: угла атаки, траектории и скорости движения кисти.
Мы детально проанализировали вариант техники плавания брассом Дона Маккензи и признали его оптимальным. Что можно сказать о других вариантах техники движений пловцом, несходных с данным? В какой мере техника плавания брассом может отличаться от только что рассмотренной и в то же время не противоречить общим закономерностям гидродинамики? Ответ на подобные вопросы можно дать лишь после того, как будет проанализирован каждый конкретный случай в отдельности. Тем не менее мы можем говорить об общих чертах правильной техники плавания брассом. Приводимый ниже в данном разделе материал призван выделить такие общие черты техники.
Гидродинамический анализ движений пловца № 2
Пловец № 2 владел вариантом техники плавания брассом с длинным и, как казалось вначале, мощным гребком руками. Работая с этим молодым талантливым спортсменом в начале спортивного сезона, я не обращал внимания на тот факт, что во время завершения гребка он прижимает локти к груди. Мне казалось, что это не влияет на качество рабочих движений руками. Когда же был проведен гидродинамический анализ техники плавания этого пловца, мне пришлось изменить свою точку зрения.
Рис. 149. Сравнительный анализ эффективности гребков пловца № 2:
А - положение рук в начале и конце длинного гребка; Б - траектория движения кисти и сила тяги при длинном гребке; В - траектория движения кисти и сила тяги при коротком гребке; Г - график силы тяги при длинном и коротком гребках
Увеличенная длина гребка руками пловца № 2 (рис. 149, А) обусловливала менее эффективную траекторию движения кисти во второй половине гребка (рис. 149, Б, точки траектории 12-15). В результате равнодействующая сила R, равная по величине 25,5 фунта, отклонилась в сторону (кнаружи) слишком сильно, что вызвало уменьшение силы тяги T (равна всего лишь 10 фунтам). Гребок оказался явно неэффективным.
Исправляя отмеченный недостаток техники движений, мы стали работать над гребком, сходным с гребком Дона Маккензи.
Особое внимание было обращено на то, чтобы кисти рук во время гребка не заходили за линию плеч, а локти не прижимались к груди. Когда спортсмен овладел этой техникой гребка, вновь был сделан гидродинамический анализ. Он показал, что эффективность гребка, который теперь условно можно назвать коротким, повысилась (рис. 149, В).
Анализируя рис. 149, Б и 149, В, следует обратить внимание на то, что при одном и том же положении руки во время длинного и короткого гребка направление равнодействующей силы R, образующейся на кисти, во втором случае в большей мере приближается к направлению продвижения пловца вперед. Вследствие этого резко возрастает сила тяги Т (равна 33,1 фунта). Большой прирост силы тяги становится возможным благодаря не только изменившейся форме траектории движения кисти, но и тому, что пик скорости этого движения возникает на коротком гребке немного позднее, ближе к точке 13 траектории (см. рис. 149, В), чем при длинном.
Техника короткого гребка руками соответствовала индивидуальным возможностям пловца № 2, и через три месяца занятий он улучшил свой результат в плавании брассом на дистанции 100 ярдов сразу на 5 сек.
Рациональность для данного пловца короткого гребка по сравнению с длинным становится очевидной, когда мы посмотрим на график силы тяги во время того и другого гребка (рис. 149, Г).
Отметим, что средняя величина силы тяги во время рабочего движения кисти кнутри составляет при длинном гребке 8,2 фунта, при коротком - 12,5 фунта. Эти данные подтверждают правильность рекомендации Джеймса Каунсилмена, высказанной на конференции тренеров в сентябре 1974 г. по поводу того, что пловцы-брассисты не должны прижимать локти к груди в конце гребка руками. Траектория движения кисти, подобная той, которую мы видим на рис. 149, Б, надо полагать, не позволяет пловцу при длинном гребке руками развивать достаточно высокую силу тяги.
Гидродинамический анализ движений пловца № 3
Пловец № 3, когда мы заинтересовались его техникой плавания, применял узкие, но, как нам казалось, достаточно эффективные движения руками. Его гребок представлял круговое движение руками, при котором кисти, выполняя давление на воду кнаружи, не заходили в стороны за локти (рис. 150, А). Гидродинамический анализ выявил хорошие форму траектории движения и угол атаки кисти, а также оптимальное направление равнодействующей силы реакции воды R, близкое к направлению продвижения пловца вперед (рис. 150, Б). Правда, максимальное значение скорости движения кисти во время гребка оказалось низким - всего 10,3 фут/сек (аналогичные характеристики у пловца № 1 и пловца № 2 были равны соответственно 17,7 и 14,6 фут/сек). Этот последний показатель удивил нас, так как пловец № 3 был хорошо тренирован и обладал достаточно высоким уровнем силы.
Было сделано предположение, что недостаток скорости движения кисти обусловлен небольшой амплитудой траектории ее движения. С целью увеличить время для ускорения кисти при ее движении кнутри пловцу была предложена техника более широкого гребка.
Результат перестройки техники не замедлил сказаться. Скорость движения кисти на анализируемом участке траектории возросла до 13.1 фут/сек, соответственно увеличилась и сила тяги (рис. 150, В).
Надо заметить, что, хотя широкий гребок оказался более мощным для данного пловца, его нельзя признать экономичным.
Сравнительный анализ сил на рис. 150, Б и 150, В показывает: при широком гребке величина равнодействующей силы R возросла на 16,7 фунта, а величина силы тяги Т - всего лишь на 2,3,фунта. Иными словами, за небольшой прирост в силе тяги пловцу пришлось заплатить большими тратами энергии.
Однако и эта небольшая прибавка в силе тяги позволила спортсмену улучшить за спортивный сезон свой результат на дистанции 100 ярдов на 5 сек.
На рис. 150, Г показан график силы тяги данного пловца во время выполнения узкого и широкого гребков. Средняя величина силы тяги во время рабочего движения кистью внутрь равна при узком гребке 7,5 фунта, при широком - 12.2 фунта. Прирост силы тяги на 4,7 фунта обусловлен тем, что равнодействующая сила реакции воды R возросла на кисти пропорционально квадрату увеличения скорости ее движения (увеличение скорости на 41% вызвало увеличение силы реакции на 100%). Как видим, пловцу чрезвычайно выгодно увеличивать скорость движения кисти, сохраняя при этом оптимальными ее угол атаки и траекторию движения. Во время плавания способом брасс все эти компоненты эффективного рабочего движения могут быть достигнуты при сравнительно широком гребке.
Рис. 150. Сравнительный анализ эффективности гребков пловца № 3:
А - амплитуда движений кисти во время узкого и широкого гребков; Б -траектория движения кисти и сила тяги при узком гребке; В - траектория движения кисти и сила тяги при широком гребке, Г - график силы тяги при узком и широком гребках
Заключение
Проведенный гидродинамический анализ движений спортсмена при плавании способом брасс позволяет сделать следующие выводы:
Гребок руками представляет собой винтообразное движение, создающее силу тяги за счет движений кистями из стороны в сторону; во время гребка вода отталкивается кистями назад минимально или совсем не отталкивается.
Во время гребка кисть руки ускоряет свое движение дважды: первый раз - при движении кнаружи, второй - при движении кнутри.
Величина угла атаки кисти во время гребка руками в значительной мере обусловливает величину возникающей на ее поверхности подъемной силы (аналогично тому, как это происходит на крыле или лопасти винта самолета).
Длинный гребок руками, во время которого спортсмен прижимает локти к груди, надо рассматривать как малоэффективный и не соответствующий закономерностям гидродинамики.
Узкий гребок руками, при котором кисти рук, выполняя давление на воду кнаружи, не заходят в стороны за локти, не позволяет развить высокую скорость движений кистями кнутри, а тем самым не обеспечивает создания в заключительной фазе гребка руками необходимой величины подъемной силы.
Данные выводы тренер может рассматривать в качестве общих закономерностей, на которые следует опираться при совершенствовании техники плавания брассом. Несомненно, в процессе работы над техникой плавания тренеру необходимо учитывать индивидуальные особенности спортсменов, вариативность их движений.